

 如果结果不匹配,请
如果结果不匹配,请 
 更多“稳态误差是指系统稳定后系统的输出信号与输入信号之间的差。()”相关的问题
更多“稳态误差是指系统稳定后系统的输出信号与输入信号之间的差。()”相关的问题
已知单位反馈系统的开环传递函数
(1)绘制当K0=0→∞变化时系统根轨迹图(求出渐近线,分离点与虚轴交点);
(2)确定开环增益K的取值范围,使系统满足以下条件:

(3)确定在单位斜坡输入下系统稳态误差的最小值。
已知单位负反馈系统开环传递函数
试分别求出当r(t)=1(t)、t和t2时,系统的稳态误差(e=r-c)。
设一随动系统,其开环传递函数为
如要求系统的速度稳态误差为10%,Mp≤1.5,试确定中联校正装置的参数。
一单位反馈控制系统的开环传递函数为
已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t-0.4-3.73,求系统的阻尼比ζ、自然振荡角频ω0率 、系统的开环传递函数和闭环传递函数、系统的稳态误差。
已知单位负反馈系统的开环传递函数为:
其中K>0、T>0。试确定使闭环系统稳定时,参数K、T应满足的关系:并计算在输入r(t)=tX1(t)作用下系统的稳态误差。
设有如图6-20所示控制系统
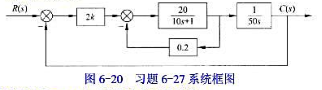
(1)根据系统的谐振峰值Mp=1.3确定前置放大器的增益k;
(2)根据对Mp=1.3及速度稳态误差系数Kv≥4s-1要求,确定串联滞后校正环节的参数。
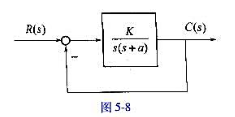
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。
设有一数字均衡器的系统函数为

(a)画出二阶子网络Hk(2)的正准型信号流图,并且标出乘积的含入误差的馈入点。
(b)令Ha(z)-H1(z)H2(z),再令Hb(z)-H2(z)H1(z),比较在两种不同的级联
次序下乘积的舍入误差所产生的输出噪声功率的大小。
注:写出每种情况下输出噪声功率的表达式,只需要用留数定理计算这两个表达式中不同的积分以进
行比较,并不需要计算表达式中的每一个积分。
一个二阶IIR网络的系统函数为

用6位字长的定点算法来实现,尾数作舍入处理。
(a)在正准型结构下,画出信号流图,并且标明乘积项有限字长效应所产生的误差的输入点。
(b)计算由于乘积的有限字长效应所产生的输出噪声功率。
(c)对于级联型结构,重复(a)、(b)。
(d)对于并联型结构,重复(a)、(b)。
















